Researchers have programmed a robot that is able to understand and react to human movement.
The team, based at the University of Lincoln, UK, have developed a computational model which focusses on the essence of movement, representing the relative movement of human and robot in relation to one another.
This enables the robot to reason about not only its movements but how the human will be influenced by it; and how the robot should then react to the human’s behaviour.
The research was carried out as part of the collaborative STRANDS project aimed at creating mobile robots that are able to operate independently, based on an understanding of 3D space and how this space changes over time.
Funded by the European Union’s Seventh Framework programme (FP7), the research project involves six academic partners, a security company and an Austrian care home provider, where the technology will be tested.
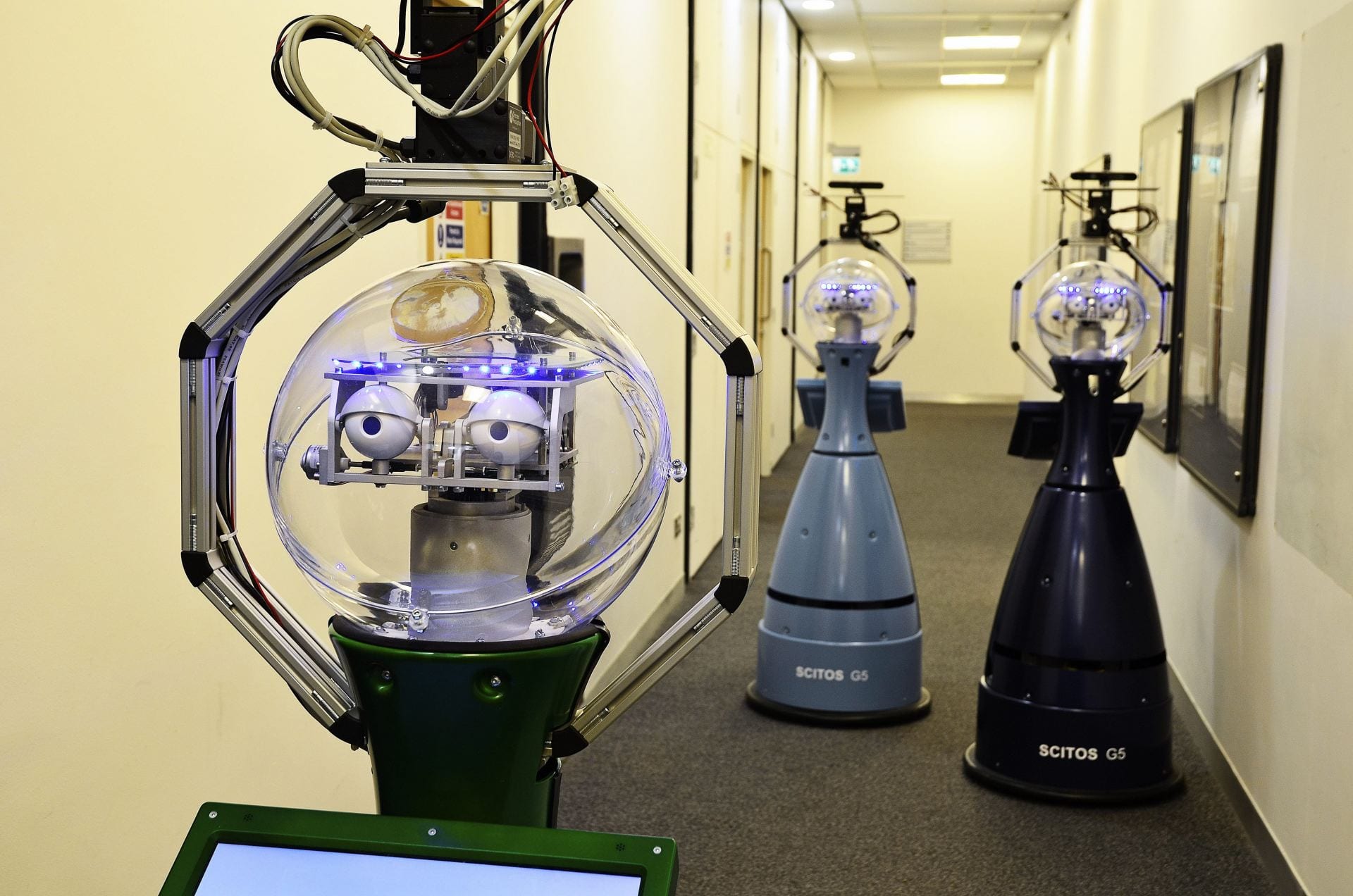
Linda, who is based at the University of Lincoln, is one of six specialist mobile robots currently being programmed to act intelligently in real-world environments, with the ultimate aim of being able to support security guards or staff in care homes.
Named after the city’s Roman roots as Lindum Colonia, Linda was used to test out the model.
Lead author Christian Dondrup, from Lincoln’s School of Computer Science, said: “For mobile robots to be used in populated environments, they have to understand how humans behave and be able to move when encountering each other in a corridor for example. In such situations, the robot’s movement not only has to be safe but the robot has to be able to convey its intention on where and how to move, how to react to the human’s movements, and how the human will react to it. Current research mainly focuses on how the robot has to avoid a human, but not on how their movement might influence each other.”
The research paper has been published in the international journal Robotics.