Congratulations to the LCAS team and the Intlab team for the publication of their paper “The Impact of Motion Scaling and Haptic Guidance on Operators’ Workload and Performance in Teleoperation“ within
ACM CHI’22!
The L-CAS team, in collaboration with intLab at the University of Lincoln, is pleased to announce the publication of our paper on “The Impact of Motion Scaling and Haptic Guidance on Operators’ Workload and Performance in Teleoperation“ at CHI’22.
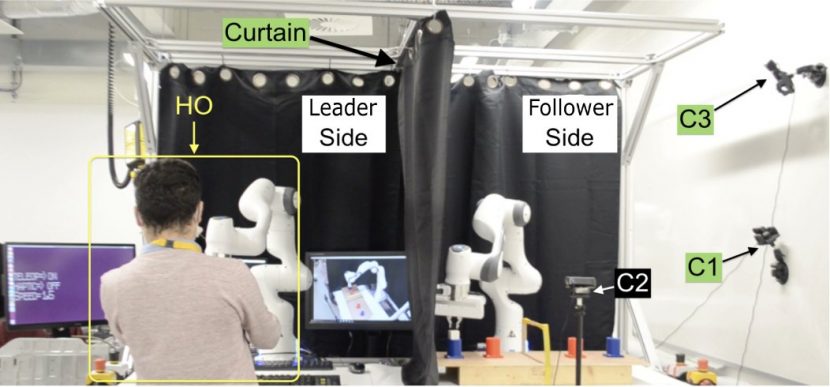
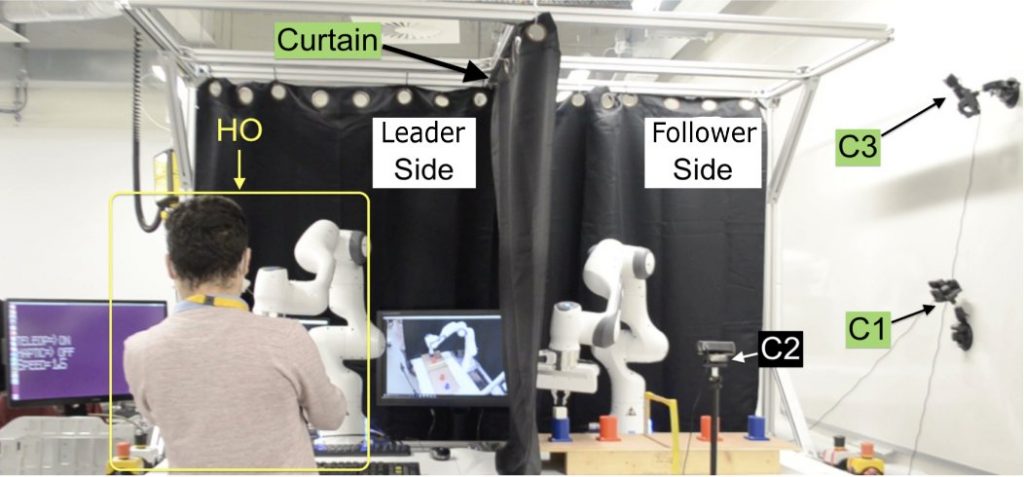
The use of human operator managed robotics, especially for safety critical work, includes a shift from physically demanding to mentally challenging work, and new techniques for Human-Robot Interaction are being developed to make teleoperation easier and more accurate. This study evaluates the impact of combining two teleoperation support features (i) scaling the velocity mapping of leader-follower arms (motion scaling), and (ii) haptic-feedback guided shared control (haptic guidance). We used purposely difficult peg-in-the-hole tasks requiring high precision insertion and manipulation, and obstacle avoidance, and evaluated the impact of using individual and combined support features on a) task performance and b) operator workload. As expected, long distance tasks led to higher mental workload and lower performance than short distance tasks. Our results showed that motion scaling and haptic guidance impact workload and improve performance during more difficult tasks, and we discussed this in contrast to participants preference for using different teleoperation features.
Those involved:
Read it here: https://doi.org/10.1145/3491101.3519814
Original post by Mark Hanheide (Lincoln Centre for Autonomous Systems – LCAS): https://lcas.lincoln.ac.uk/wp/the-impact-of-motion-scaling-and-haptic-guidance-on-operators-workload-and-performance-in-teleoperation/